 您好,欢迎访问深圳特信电子有限公司网站!
您好,欢迎访问深圳特信电子有限公司网站! 公司总部:深圳市龙岗区坪地街道坪西社区兴华路1号深圳市特信电子有限公司
手机:18902469939
邮箱:806667198@qq.com
服务热线:0755-83247232

Latest News
Latest News
Contact Us
无人机反制设备打击的有效范围是多少?
2019-04-26 17:10:42
当向潜在客户展示您的反无人机系统是时,个问题总是相同的:“打击的范围是什么?”
不幸的是,大多数客户都熟悉链路和通信设备,但对干扰和设备本身的概念不太熟悉。因此,他们不明白为什么这个问题没有“简单”或单一的答案。
本文的目的是解释如何实现“链接”块的计算和/或度量。很明显,干扰器并没有链接到受害者,但我们可以像我们观察两个“合作伙伴”之间的正常沟通链接一样分析它们之间的相互作用。
一般来说,我们可以说通信链路只有一个需要计算的维度(TX-> RX),对于阻塞情况,需要计算两个维度(TX-> RX和干扰器-> RX)然后进行比较。将在接收机输入端呈现更强信号的“链路”将占主导地位; 它可以是变送器(“合作伙伴”)或阻滞剂。
为了更好地解释这个问题,我们将首先尝试解释通信阻塞的基本概念。
阻止概念
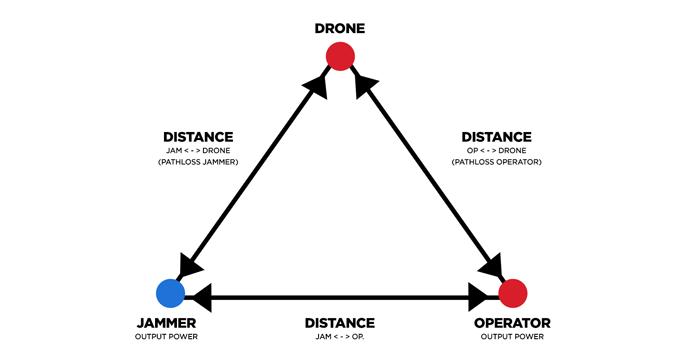
干扰器的作用是中断两个(或更多)合作伙伴之间的通信链路(或网络); 当他们试图彼此交谈或在他们之间传递某些数据时,即使在无人机与其操作员之间发生通信链接也是一个特殊情况,与其他许多人不同。我们可以尝试阻止手机和基站之间,两个战术收音机之间,泵和用于激活它的遥控器之间的通信等。简单的锁定案例好描述为下面的“三角形”(图1)。

图1 - 块的“三角形”
为了阻止,干扰器以与敌方的链路或网络相同的频率发射射频能量(CW +调制)。敌方接收机(“收听”方)将接收阻止者传输和“伙伴”传输。更强大的意志占上风; 如果阻断器的功率大于伙伴的功率,听众将无法正确理解消息/数据。或者,如果“合作伙伴”的权力大于阻止者的权力,则听众可能能够正确理解消息/数据,并且伙伴之间的通信链接应该继续不间断。
这个解释有点肤浅,旨在简化事情。但是,如果我们试图深入研究这个问题,可以插入更多参数来比较两个链路的信号电平。一个例子是接收器在其输入中“看到”的SNR(信号噪声比)。有时到达接收机输入端的干扰信号可能会小于通信信号(“伙伴”)并仍然占上风。发生这种情况的原因通常是接收器在输入端的两个信号之间需要一定的余量,以便能够解释其中的一个(通常是强的一个)。但是,在先进的通信系统中,
为了简单起见,我们在讨论中不考虑SNR,并且我们将继续假设接收机输入端的强信号总是“胜利”。
计算/测量 的的 有效干扰的范围
在了解了干扰的基础知识后,我们将尝试了解干扰的范围是如何计算的。应该为此使用以下“二维三角形”(图2):
在该图中,假设阻拦天线的高度以及操作员遥控器的高度与无人机高度(典型飞行高度10-20米)相比相对较小。现在也应该提到阻塞天线安装得越高 - 干扰的范围越大; 同样,操作员获得遥控器越高,通讯范围越大(因此干扰范围越小)。
现在是另一个重要澄清的时候了。一般来说,在无人机应用中,其目的是在距离敏感区域/周边(安装阻挡器的地方)数百米内锁定无人机。例如,我们想拦截距离干扰机300米并在10米高处飞行的无人机。可以看出,在这种情况下,阻挡器和无人机之间的对角线距离近似等于它们之间的水平距离。因此,为了简化事情,我们将讨论水平距离,并且不会因准确的距离计算而烦恼,因为差异非常小。
现在,让我们编写描述到达接收器输入端的信号功率电平的数学表达式,忽略电缆损耗。
接收器输入端的操作员信号
Ro = Po + Go - Plo + Gdo
其中:
Ro =无人驾驶接收机输入端操作员遥控器的信号电平;
Po =操作员遥控器的输出功率;
Go =操作员遥控器的天线增益;
Plo =在操作员的遥控信号上造成的传播损失。“无人机< - >操作员距离”用于计算此损失,以及无人机高度和遥控天线高度;
Gdo =无人机接收机的天线增益,当向操作员方向“看”时;
重要提示:Ro必须大于无人机接收机的灵敏度,否则操作员与您的无人机之间不会建立通信链路(因此不需要阻挡器)。
接收器输入端的干扰信号
Rj = Pj + Gj-Plj + Gdj
其中:
Rj =无人机接收器输入端的干扰信号电平;
Pj =在所使用的特定频率/通道处的干扰器的输出功率;
Gj =在所使用的特定频率/信道下的干扰天线的增益;
Plj =干扰信号上的传播损失。距离“干扰器 < - > Drone”用于计算此损耗,以及无人机的高度和干扰器天线的高度;
Gdj =无人机接收机的天线增益,当向着干扰机“看”时。
然后需要比较Ro和Rj。如前所述,为了简单起见,我们将假设它们足以比较它们,而强烈的信号总是“胜利”。我们将:
Pj + Gj - Plj + Gdj(<=>)Po + Go - Plo + Gdo
该等式尽管以其简单的形式(没有电缆损耗,SNR等)可用于计算EACH块场景。可以看出,它由两个维度/链接(Blocker < - > Drone和Operator < - > Drone)组成,而不仅仅是通信链接的维度/链接。
换句话说,对于无人机链路的每个特定条件(特定输出功率,天线的增益和高度,距离等),存在无人机链路的特定场景/条件,它。这就是为什么我们回答“反无人机打击系统的有效范围?”的问题。从来不是一件容易的事。有很多可能的答案!
让我们试着更好地理解这个困难。乍一看,这个方程似乎不太复杂。但是,当“深入挖掘”每个参数的细节时,很快就会发现一个非常复杂的情景:
答:如果干扰器的输出功率不是所有通道的固定值,则对于干扰器打算攻击的每个频带,Pj具有不同的值; Po的情况也是如此,因为我们经常遇到不同的Drone模型(和遥控器),它们具有完全不同的特性;
B.如果干扰器天线的增益不是所有通道的固定值,则对于干扰器打算攻击的每个频带Gj都有不同的值; Go也是如此,因为我们经常遇到不同的Drone模型(和遥控器),它们具有完全不同的特性;
C.假设无人机处于运动状态,那么Gdj和Gdo的值可能会不断变化;
D.后,动态和不断变化的参数是在两个信号(Plj和Plo)上造成的Pathloss(传播损失)。无人机运行后,“干扰器 < - > Drone”距离和“操作员无人机”距离会不断变化; 一般来说,当他们中的一个越来越大,另一个越来越小。更糟糕的是,更多的参数,例如干扰器天线高度和遥控天线,以及无人机的高度也正在进入该计算。
现在我们知道上述方程中出现的所有八(8)个参数可以有很大的变化,因此应该非常清楚,因为干扰范围的定义并不那么简单。答案始终是CONDITIONED。例如,如果有人问我们干扰机是否可以在300米的距离阻挡无人机,答案是有时候它会是,有时候不会。确切的答案总是取决于以下几个方面:
A.我们试图攻击的具体Drone模型(它将定义所使用的频带,等式两边的输出功率和天线增益);
B.每个元件的天线高度(无人机天线,操作员天线和干扰天线)。
注意:我们可以尝试在这里定义一个“共同点”,以减少变量的数量。我们认为,当无人机在地面上时(高度= 0米),必须计算或测量干扰范围。干扰器和操作员也应该在地面上(天线高度高1-3米),而不是在山上或建筑物顶部。这是一个很好的测量方法,因为它也模拟了干扰器的坏情况。这是由于Drone天线的全方位行为,以及“干扰器 < - > Drone”距离大于“Operator无人机”这一事实,使得干扰器信号非常比操作员的信号更容易受到地面反射的影响。现在应该提及的是,
C.距离比(干扰器 < - > Drone / Operator < - > Drone)。为了更好地理解这一点,让我们从4:1距离比(图3)中检查以下情况:
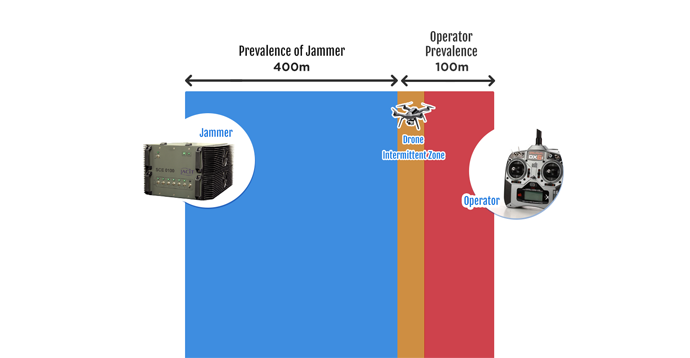
图3 - 距离比例为4:1的示例
从图2D中,可以清楚地看到,无人机运动同时影响两个距离(干扰器 < - > Drone和Operator < - > Drone)。当无人驾驶操作员距离较短时,无人机距离较远,反之亦然。因此,当无人驾驶飞机靠近其操作员(本例中小于100米)时,出现在无人机接收器输入端的操作员信号比干扰信号强。当无人机靠近干扰机(本例中小于400米)时,出现在无人机接收机输入端的干扰信号比操作员信号强。
结论
正如本文所显示的,我们不能说真正的达到,而是距离关系。即使这种关系也不能被认真讨论,更不用说无人机模型和天线高度,为此计算和/或测量这个比率。
推荐产品



